Home
Welcome to the documentation wiki for our Open Lab Automata project! Let's get to know a little bit about OLA and, specifically, our liquid handling robot, supported by this awesome documentation.
OLA (Open Lab Automata) is a community of people and projects focused on the automation of laboratory processes using open source technologies.
 ❤️
❤️
This documentation wiki contains hardware, software, and development information for a fully functional prototype of our open hardware pipetting robot and its software, which we call the Pipettin Bot.
Info
This documentation is work in progress. You'll see notices like this one marking pending work.
Please get in touch if you'd like to improve these docs. All contributions are welcome. 
The new version and documentation can be considered in beta state, ready for reproductions and independent testing.
Introduction¶

The core idea behind OLA is to enable more people to do more research with their time, by lowering the entry barrier to lab automation on all fronts.
OLA's MK3 (a.k.a the pipettin' bot) is a liquid handling robot that is:
- Precise.
- Minimal in cost, easy to use and make.
- Fully open source and documented.
- Modular in design, highly hackable, and meant to integrate well with other lab automation projects.
Check out the short summary below to learn more, and don't forget to get in touch. 🤖❤️
The MK3 (make n°3) is the current version. It is fabricable, affordable, and adaptable, and fully free tech; thus allowing anyone to independently study, build, and modify its hardware and software.
It can perform liquid handling tasks, change between tools automatically, be programmed using a very nice web user interface or through Python.
This documentation supports the independent usage, construction, and extension of the Pipettin Bot, and is also open source.
It is intended to be exhaustive, because we understand that insufficient documentation makes independent reproduction really hard. By using or making OLA's MK3 you will be able to automate your processes, and become familiar with automation in small steps.
To access the project's sources, visit the sources page.
Demo¶
An overview presentation of the project is up on Youtube. It was prepared for the final demo of the Open Hardware Makers program.
Here is a video of the current version, running a simple volume transfer protocol.
Specifications¶
These are the main characteristics of the MK3 reference robot:
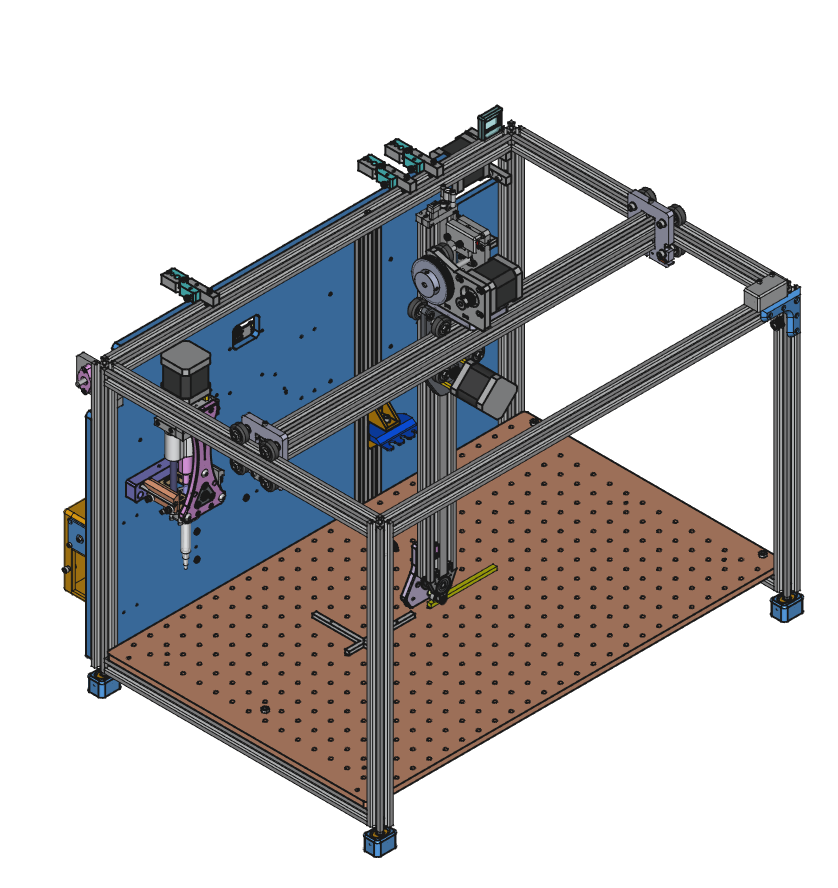
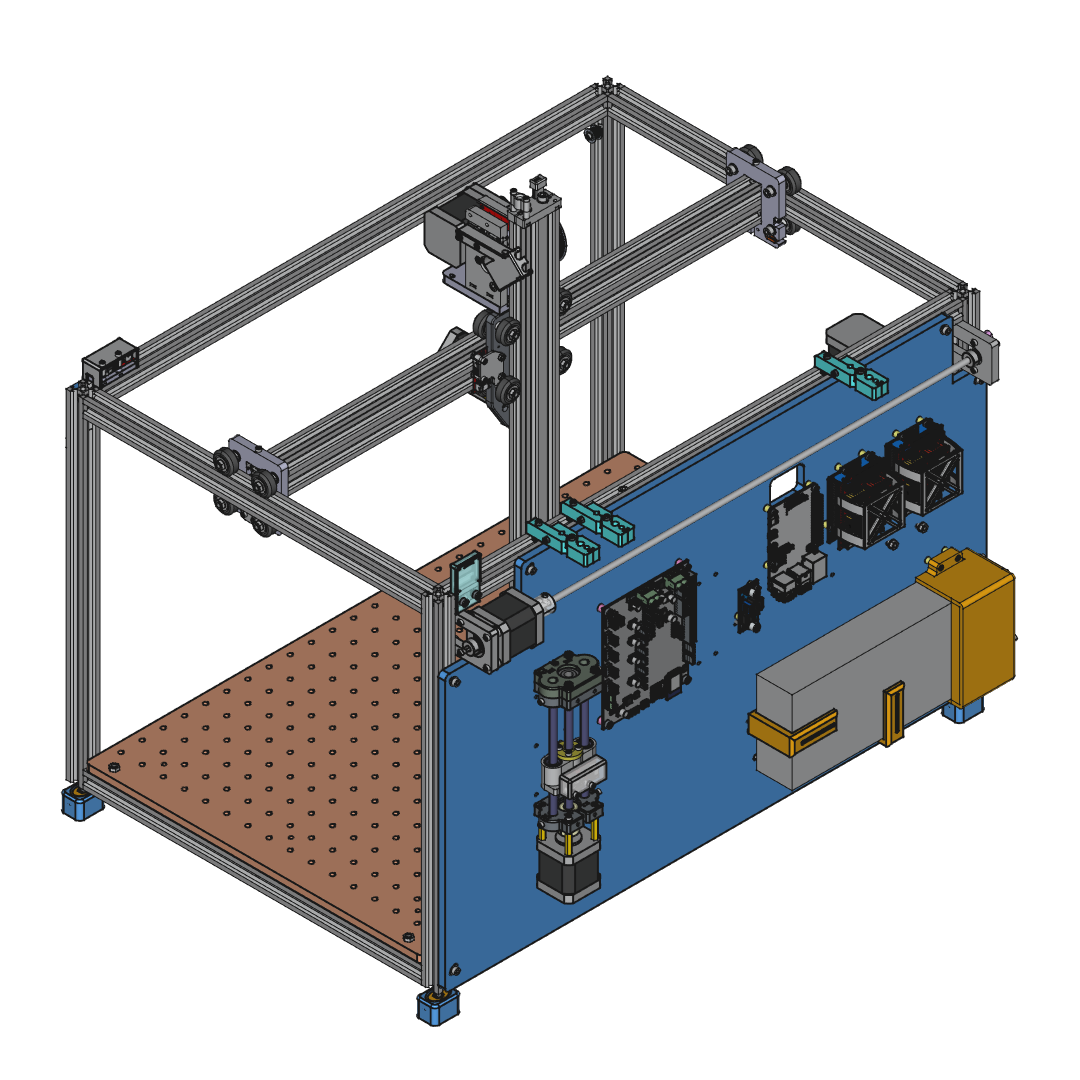
- Workspace volume: 480 x 300 x 250 mm (XYZ).
- Frame dimensions: 600 x 400 x 350 mm (XYZ).
- Liquid handling with OLA's original micropipettes, in the 2-1000 uL range.
- Adapters for commercial micropipettes (e.g. Gilson's Pipetman).
- Tool-changing head, compatible with the E3D/Jubilee tool interface.
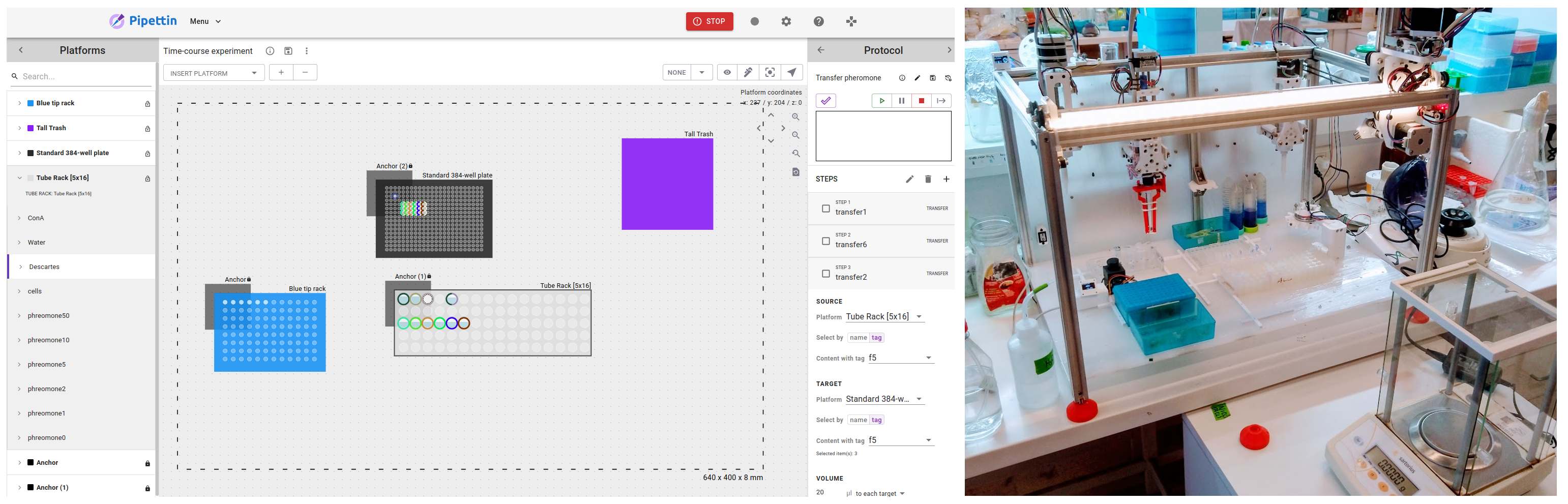
- Web interface and Python APIs for writing and executing custom lab protocols with ease.
- Evergrowing documentation.
- Designed fully free and open-source with FreeCAD ❤️.
Info
Detailed technical information can be found in the technical overview page.
Status¶
The project is approaching a stable release, with the main focus on stabilization and usefulness to current and future OLA builders and owners.
Here is a summary of its status:
🍎🌼🌱
- 🍎 Stable: Stable and ready for general usage.
- 🌼 Beta: Mostly complete, but not yet stabilized.
- 🌱 Alpha: In development, limited functionality, expect major changes.
| Component | Stage |
|---|---|
| Assembly Documentation | 🍎 Stable |
| User Documentation | 🌱 Alpha |
| Robot Hardware | 🍎 Stable |
| Micropipette Tool | 🌼 Beta |
| Protocol Writer UI | 🍎 Stable |
| Python APIs | 🌱 Alpha |
Documentation¶
New here? You'll find this documentation divided into a few handy sections.
By visiting the Getting Started section, you will find quick links to important pages in this wiki. Those are divided into guides and development pages.
If you are looking to dive into the project's documentation right away, you can also visit the Technical Overview section for a quick but effective overview of Pipettin bot's mechanics, electronics, and software.
If you aim to build the robot from scratch you can go directly to the Assembly Guide.
If you are looking for guidelines on how to use the Pipettin Bot software you can visit the Usage Guide.
Want to know more about Pipettin Writer? An overview of our protocol designer web-app can be found in the User Guide. 
Manuals
"Hours of troubleshooting can save you minutes of reading the Manual" (source: Reddit).
About¶
Audience¶
This project is currently aimed at people and organizations with experience in research, hardware and/or software, who want a machine that works for their needs, and also collaborate with its development.
Now, we know that right now, we might not be holding the hands of beginners, but we're all about growth and learning. So, even if you're new to the game, keep an eye on us. We're coming out with ideas and plans to make our documentation a welcoming place for beginners down the road!
Check out the Contributions page, where we lay out the various ways you can either contribute or get support.
Motivation¶
We believe our project will fill a gap in OSH liquid handling robots. By fully complying with OSH definitions, we hope to enable anyone who wishes to independently study, build, or modify the hardware.
The acquisition cost of most pipetting robots (of at least 10.000 US dollars) is still prohibitive for all of our region’s laboratories but the elite.
We want to make a versatile lab automation machine anyone can actually make or purchase; enabling more people to do more research with their time.
Objectives¶
Our goal is to make a machine which is:
- Easy to use
- Fully open-source
- Highly documented
- Modular in design
- Minimal in cost
- Very hackable
- Integrates well with open science hardware projects.
To these ends, we are:
- Growing multimedia documentation covering most aspects of the project,
- Relying on and prioritizing widely available components, 3D printing, and modularization;
- Designing performant tools while minding costs, and encourage the integration of existing equipment (i.e. the micropipettes),
- Maintaining modularization of hardware and software, through tool-changing system and software interfaces with other OScH products (thermocyclers, turbidimeters, colony-pickers, etc.).
Licensing¶
Our Pipetting Bot's MK3 hardware is distributed under the terms of the CERN OHL-S v2 license, and its software is licensed under the terms of GNU Affero General Public License v3.0. Full texts are available on the Licensing page.
This is the web documentation for the project, which is distributed under the Creative Commons CC-BY-SA license. License text available here.
The usage of OLA's logo and visual identity are reserved to its community. If you want to use or modify them, please get in touch to ask for permission.
Get in touch¶
You are very welcome to chat!
If you wish to email us, browse to the contributions page
Social¶
 YouTube: https://www.youtube.com/@OLA-OpenLabAutomata
YouTube: https://www.youtube.com/@OLA-OpenLabAutomata
 Instagram: https://www.instagram.com/openlabautomata/
Instagram: https://www.instagram.com/openlabautomata/
 Landing page: http://www.openlabautomata.xyz/
Landing page: http://www.openlabautomata.xyz/
Discord chat¶
You are welcome to join and chat at our Discord server.
Chat with us and tell us about your issues, ideas, and find general support.
This is a developers chat. Please be respectful of others and their time.
![]()
GitLab Tracker¶
If you're familiar with GitLab, all issues can be found here.
You can contribute through GitLab, where the project's development lives. If you want to open a discussion about a well-defined topic, related to development, you can post a new issue at the main GitLab repository.
Alternatively, email our GitLab service desk. This will create a private issue, and we'll get back to you as soon as possible.
We make extensive use of Issue Boards!
![]()
How to contribute¶
The growth of the OLA project relies on the collective efforts of a diverse community of projects and contributors. We welcome everyone to actively participate and support the development of this open-source pipetting robot, and the open-source projects on which it was built.
Everyone can contribute in diverse and valuable ways.
Development¶
There are many areas where you can contribute, ranging from improving the documentation, writing tutorials, submitting bugs or even writing code for new features for the MK3 Pipettin Bot itself.
Whether you are an experienced technician, a software developer, a scientist, or simply passionate about advancing liquid handling technology, there are various ways you can contribute to the project's growth and impact.
A full list of types of contributors and ways to contribute is available here.
Financial Support¶
We are grateful for any donations, grants, or funding in general that can help continue to develop and improve the OLA project. Your contributions will help cover the costs of hardware, software, and development time, as well as help us reach a wider audience.
If you want something to happen, want us to do it, and have the funds to support it, we'd be thrilled to work with you.
You can donate to the OLA project through Liberapay. This is a platform that allows you to make recurring donations to people and projects that you are interested in.
❤️
We also welcome investors to the OLA project. If you are interested in investing in the project, please contact us through OLA's Discord server.
Thank you for your support! All of our work is and will always be open source.
Acknowledgements¶
A full list of collaborators is available here
Original development by Nicolás and Facundo:
- The original web UI and its design.
- Models for the the CNC frame and pipette actuators.
- CNC and pipette driver modules for the bot.
Development community:

We are very grateful to:
- The developers of GRBL, the greatest firmware for the Arduino UNO + CNC shield.
- The Jubilee3D folks, for the welcoming and supportive chats.
- The community behind Klipper, "a 3D-printer firmware".
- The reGOSH free tech, latin-american network, and the truly awesome people at GOSH.
- GitLab inc. for being great, and supporting us through their GitLab for Open Source program.
- And to the greater open-source community!
We thank the Gathering for Open Science Hardware, the Alfred P. Sloan Foundation, and Fondo de Innovación Tecnológica de Buenos Aires for their support.

We thank reGOSH for bringing us together, making the project possible.
![]()
FAQ¶
- Can anyone access to OLA documentation?
Yes. Anyone can access to OLA documentation and it's repository, as it is an Open Source Hardware project.
- Is this documentation only addressed to people who have previous knowledge in electronics, mechanical or other subject relevant to the bot?
No. Even though it might be easier to understand the purpose and functionality of OLA having some sort of previous knowledge, the idea of this documentation is that anyone who aims to assemble the bot can.
Navigation:
Next: Getting Started →