Pipette calibration assays
Pipette calibration assays¶
Micropipette calibration notes.
See: https://gitlab.com/pipettin-bot/pipettin-grbl/-/issues/44
Standard micropipettes are meant to be used by hand, but we use a stepper, which needed corrections to gather and dispense the correct solution volumes.
The main takeaway is that pipetting less than 20uL with a p200 will get you into surface-tension-trouble-land (but the effect could be corrected for 1% error).
Procedures and Results¶
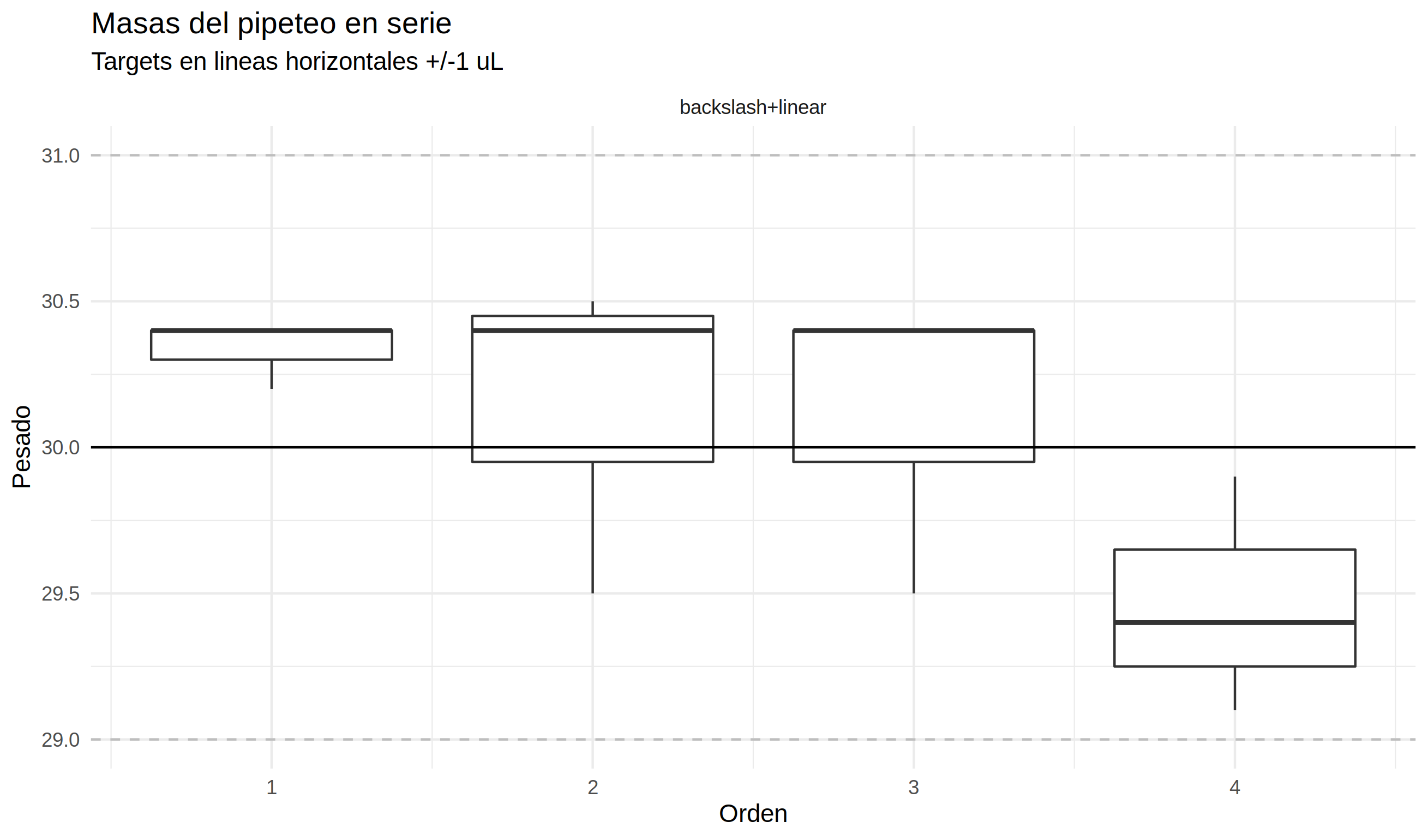
Volume calibrations were performed gravimetrically, using two pipetting modes:
Direct: In this mode, the robot attempts to transfer a specific volume (X) in a single movement. Serial: In this mode, the robot transfers the same volume (X) to N different tubes. This is done in a single loading movement, followed by N unloading movements.
Info
The direct mode is simply a special case of the serial mode, where N = 1.
The calibration procedure consisted of the following steps:
- Weigh empty tubes.
- Have the robot use the tubes to pipet (using one of the pipetting modes).
- Weigh the tubes with the liquid added by the robot.
- Calculate the difference between the final and initial weights of the tubes.
- Plot the results of the calibration sessions.
The results of the calibration showed that the robot was able to accurately pipet the desired volume in both modes. The serial mode was slightly more accurate than the direct mode, but the difference was not significant.
Calibration list¶
Visit the knowledgebase for further information about this.
Custom micropipettes¶
Well suited to automation.
See: https://gitlab.com/pipettin-bot/pipettin-grbl/-/issues/80